Next: Risoluzione di un sistema Up: Interpolazione di funzioni Previous: Neville Indice
L'interpolazione mediante spline prevede un approccio diverso al
problema dell'interpolazione. Le spline sono funzioni
polinomiali a tratti che interpolano quindi la funzione tenendo
fisso il grado del polinomio ma dividendo l'intervallo di
interpolazione in ![]() intervalli più piccoli e considerando un
polinomio diverso per ognuno di questi sottointervalli.
intervalli più piccoli e considerando un
polinomio diverso per ognuno di questi sottointervalli.
In particolare consideremo le spline cubiche cioè quelle di grado 3.
Formalmente, data una partizione ![]() dell'intervallo di
interpolazione
dell'intervallo di
interpolazione ![]() ,
,
![]() si dice interpolante
si dice interpolante ![]() se:
se:
![]() .
.
Inoltre si può dimostrare che
![]() è una spline cubica su
è una spline cubica su ![]() è uno spazio vettoriale di dimensione
è uno spazio vettoriale di dimensione ![]() .
La dimensione dello spazio
.
La dimensione dello spazio
![]() implica che servono
implica che servono ![]() condizioni per determinare univocamente una spline cubica; di queste
condizioni per determinare univocamente una spline cubica; di queste
![]() derivano dalle condizioni di interpolazione.
derivano dalle condizioni di interpolazione.
Abbiamo implementato il metodo delle spline cubiche naturali che prevede di scegliere queste due ulteriori condizioni.
La derivata di ![]() è una spline di grado
è una spline di grado ![]() , quindi:
, quindi:
Se indichiamo con ![]() l'i-esimo intervallo
l'i-esimo intervallo
e con
ricavando l'equazione di
![]() che è il segmento di
retta che unisce i punti
che è il segmento di
retta che unisce i punti
![]() e
e
![]() e
integrando due volte per trovare l'espressione di
e
integrando due volte per trovare l'espressione di ![]() si
ottengono i seguenti risultati:
si
ottengono i seguenti risultati:
 |
|||
 |
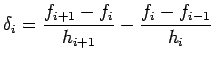
Andiamo ora ad imporre la condizione di continuità della
derivata prima. Infatti, come abbiamo detto, una spline cubica
dev'essere, per definizione ,di classe ![]() .
.
Facendo le opportune sostituzioni nella (3.6) si
ottengono ![]() equazioni della forma
equazioni della forma
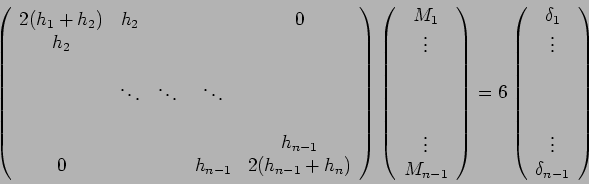
La matrice dei coefficienti di questo sistema è tridiagonale e
simmetrica, a diagonale dominante, definita positiva e quindi non
singolare, il problema è quindi ben posto.

