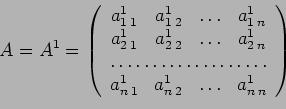
La fattorizzazione LU consiste nello scomporre una matrice A nel prodotto
du due matrici, L triangolare inferiore ed U triangolare superiore
con la particolaritá che la matrice L ha sulla diagonale tutti 1;
se esiste tale fattorizzazione è unica.
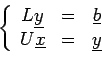
Una volta fattorizzata A basta risolvere il seguente sistema
lineare per ottenere la soluzione
Se la matrice A è di ordine  allora l'algoritmo consiste di
allora l'algoritmo consiste di  passi ognuno dei quali annulla gli elementi di una colonna
(quella corrispondente al numero del passo) sotto la diagonale principale
e lascia inalterato il ``lavoro svolto'' ai passi precedenti; tutto
questo si ottiene premoltiplicando a sinistra A per delle matrici
con struttura analoga alla L e chiamata matrici elementari di Gauss
.
Descrizione dell'algoritmo: con
passi ognuno dei quali annulla gli elementi di una colonna
(quella corrispondente al numero del passo) sotto la diagonale principale
e lascia inalterato il ``lavoro svolto'' ai passi precedenti; tutto
questo si ottiene premoltiplicando a sinistra A per delle matrici
con struttura analoga alla L e chiamata matrici elementari di Gauss
.
Descrizione dell'algoritmo: con  viene indicata la matrice
viene indicata la matrice
 al passo k-esimo e con
al passo k-esimo e con
 l'ememento in riga
l'ememento in riga  ,in colonna
,in colonna  ed al passo
ed al passo  della matrice .
L'algoritmo parte con
e ricava
della matrice .
L'algoritmo parte con
e ricava  dove adesso
dove adesso  è
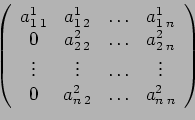
si nota che adesso nelle righe inferiori alla prima compare l'indice 2 in alto
e questo significa che l'algoritmo non modifica quello che era stato fatto
ai passi precedenti e che via via si vanno a modificare le righe inferiori
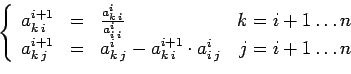
della matrice, lasciando inalterate le altre. Al passo i-esimo si ricava
è
si nota che adesso nelle righe inferiori alla prima compare l'indice 2 in alto
e questo significa che l'algoritmo non modifica quello che era stato fatto
ai passi precedenti e che via via si vanno a modificare le righe inferiori
della matrice, lasciando inalterate le altre. Al passo i-esimo si ricava
 come i prodotto
come i prodotto  dove
dove
 .
Di queste matrici
.
Di queste matrici  ce ne sono
esattamente e la loro forma è del tipo
dove
ce ne sono
esattamente e la loro forma è del tipo
dove
 indica nel modo usuale l'i-esimo vettore
della base canonica di
indica nel modo usuale l'i-esimo vettore
della base canonica di  trasposto e
trasposto e
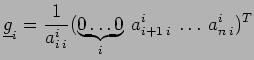
 indica
l'i-esimo vettore di Gauss definito come
Se indichiamo con
indica
l'i-esimo vettore di Gauss definito come
Se indichiamo con  il prodotto
il prodotto
 si ha
proporio che
si ha
proporio che  , infatti si ha che l'inversa di
, infatti si ha che l'inversa di  è
è
 ed è triangolare inferiore
con tutti 1 sulla diagonale, e quindi lo è anche il loro prodotto.
L' algoritmo al passo i-esimo modifica la matrice nel seguente modo
e poichè vengono annullati
ed è triangolare inferiore
con tutti 1 sulla diagonale, e quindi lo è anche il loro prodotto.
L' algoritmo al passo i-esimo modifica la matrice nel seguente modo
e poichè vengono annullati  elementi sotto la diagonale, le
loro posizioni possono essege occupare dalle componenti significative
del vettore
.
elementi sotto la diagonale, le
loro posizioni possono essege occupare dalle componenti significative
del vettore
.
Subsections
2004-05-29